蝴蝶机器人是迄今为止最快的游泳软机器人
受蝠鲼生物力学的启发,北卡罗来纳州立大学的研究人员开发了一种节能的软机器人,其游泳速度比以前的游泳软机器人快四倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于一个人在游泳蝴蝶泳时手臂的移动方式。
“迄今为止,游泳软机器人的游泳速度还不能超过每秒一个体长,但海洋动物 - 如蝠鲼 - 能够游得更快,更有效率,”Jie Yin说,他是该论文的通讯作者,北卡罗来纳州立大学机械和航空航天工程副教授。“我们想利用这些动物的生物力学,看看我们是否可以开发更快、更节能的软机器人。我们开发的原型工作得非常好。
研究人员开发了两种类型的蝴蝶机器人。其中一个是专门为速度而设计的,能够达到每秒 3.74 个体长的平均速度。第二个被设计为高度机动,能够向右或向左急转弯。这种机动原型能够达到每秒1.7个体长的速度。
“研究空气动力学和生物力学的研究人员使用一种叫做Strouhal数的东西来评估飞行和游泳动物的能源效率,”该论文的第一作者,北卡罗来纳州立大学最近的博士毕业生Yinding Chi说。“当动物游泳或飞行时,峰值推进效率发生在0.2到0.4之间。我们的两个蝴蝶机器人都有这个范围内的Strouhal数字。
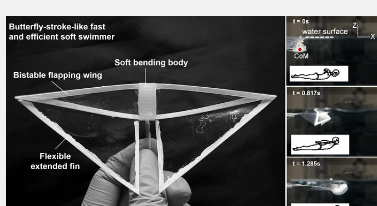
蝴蝶机器人的游泳能力来自它们的翅膀,翅膀是“双稳态”的,这意味着翅膀有两种稳定的状态。翅膀类似于按扣发夹。发夹是稳定的,直到你施加一定的能量(通过弯曲它)。当能量达到临界点时,发夹会卡入不同的形状——这也是稳定的。蝴蝶机器人的视频可以找到。
在蝴蝶机器人中,发夹风格的双稳态翅膀连接到柔软的硅胶身体上。用户通过将空气泵入软体内部的腔室来控制机翼中两种稳定状态之间的切换。当这些腔室膨胀和放气时,身体上下弯曲 - 迫使翅膀随之来回折断。
“以前大多数开发扑翼机器人的尝试都集中在使用电机直接为机翼提供动力,”尹说。“我们的方法使用双稳态机翼,通过移动中央身体被动驱动。这是一个重要的区别,因为它允许简化设计,从而减轻重量。
速度更快的蝴蝶机器人只有一个“驱动单元”——柔软的身体——控制着它的两个翅膀。这使得它非常快,但很难向左或向右转。可操纵的蝴蝶机器人基本上有两个并排连接的驱动单元。这种设计允许用户操纵两侧的机翼,或者只“扇动”一个机翼,这使得它能够进行急转弯。
“这项工作是一个令人兴奋的概念证明,但它有局限性,”尹说。“最明显的是,目前的原型是由细长的管道束缚的,这是我们用来将空气泵入中央主体的。我们目前正在努力开发一个不受束缚的自主版本。
这篇题为“为高速高效、蝴蝶泳姿状的软泳运动员捕捉”的论文将于11月18日发表在开放获取期刊《科学进展》上。该论文由北卡罗来纳州立大学博士生洪耀业共同撰写;以及赵耀和李彦斌,他们是北卡罗来纳州立大学的博士后研究员。这项工作是在国家科学基金会CMMI-2005374和CMMI-2126072的支持下完成的。
推荐阅读
- alfa romeo车标含义?(阿尔法罗密欧车标)
- 华为鸿蒙os如何操作 华为鸿蒙os2.0系统官网报名入口
- 14款沃尔沃s60l二手车能买吗?(沃尔沃s60为什么贬值厉害)
- power mp3 wma converter(mp3格式转换器)软件介绍(power mp3 wma converter(mp3格式转换器))
- 42岁李贞贤宣布平安生女,网友:歌声击退山贼的那个
- 热火朝天的高铁WiFi迟迟未到(5G能否破局)
- 华为手机性价比最高是哪几款2022? 华为哪款手机性价比高最值得入手
- 进口捷豹全部车型报价?(捷豹报价大全价格表)
- 韩庚江铠同疑相恋,两人同游马尔代夫遭曝光
- 八卦格字帖软件介绍(八卦格字帖)
- 虚拟机 操作系统(操作系统整合:虚拟机管理程序的下一步)
- 比亚迪f6参数配置?(比亚迪f6)
- 奥沙利文获世锦冠军,奥沙利文得了几次世锦赛冠军
- Evel Knievel手游游戏介绍(Evel Knievel手游)
- 索尼wi1000x拆解(SONYNZW-X1000系列高清拆解图集)
- 4座硬顶敞篷跑车都有哪几款?(4门4座硬顶敞篷车推荐)
- 艺术体操团体全能决赛,艺术体操团体全能决赛中国
- 工人物语6通用修改器游戏介绍(工人物语6通用修改器)
- 简述电机换向器的工作原理图(简述电机换向器的工作原理)
- Atheros-AR5007EG无线网卡驱动软件介绍(Atheros-AR5007EG无线网卡驱动)