人机协作改善源搜索结果
被设计用于使用算法完成寻源任务(例如火灾期间的搜救行动)的人工智能机器人,当遇到干扰时,它们往往无法完成任务。提出的解决方案包括尝试改进算法到引入额外的机器人,但这些人工智能驱动的机器人仍然遇到致命的问题。
研究人员提出了一个解决方案:人机协作,利用人脑的独特技能来克服挑战。
该论文于 2023 年 6 月发表在《社会计算杂志》上。
“是时候让人类回归了,”来自中国长沙的研究员赵勇说。“人工智能驱动的机器人通常用于物理搜索对人们来说太危险或不可能的情况,例如定位火源或识别有毒气体的来源。然而,人工智能机器人可能会遇到无法自主解决的关键问题,例如卡住或错误识别来源。这些问题很容易被人类利用他们的专业知识、经验甚至本能来解决。众包系统提供了一种新颖的解决方案。”
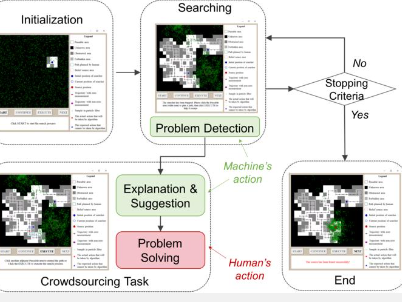
为了证明人机协作策略的可行性,研究人员首先确定了机器人可能遇到的不同类型的危险。然后将这些危险分类为人类观察者是否可以帮助人工智能解决问题。如果人工协助无法解决问题,例如搜索区域太大,则停止搜索。然而,如果问题可以通过人工帮助解决,人工智能就会对问题做出解释,并将其发送给众包。
“让人类参与自动化问题解决过程可以提高算法的功效和效率。在机器人因动态、恶化或不熟悉的环境而面临挑战的情况下,可以在不事先了解周围环境的情况下采用临时人工干预来解决这些问题。一旦解决,人工智能就会无缝地恢复对机器人的控制以继续搜索。”邱思航说道。
在确定了不同类型的危害以及人类是否可以协助源搜索场景后,研究人员开展了一项用户研究。用户研究测试了人工智能机器人的两种不同控制模式——完全控制和辅助控制。在完全控制中,人类协作者接管搜索过程。在辅助控制中,解决问题的决策树决定人类与人工智能的协作是否有益。
在辅助控制期间,当他们从算法收到有关问题的信息并且没有放弃完全控制时,参与者感觉他们的认知工作量较少并且可以解决问题。然而,非专家很难理解人工智能驱动的机器人对问题的解释,这导致研究人员根据人类在协作中的经验提出个性化交互,包括简单的语言解释。
展望未来,研究人员将根据人类参与者的背景、教育水平和个性,尝试找到包含额外个性化的方法。“这项研究为我们未来探索利用人群驱动的系统促进人类和人工智能之间的有效协作铺平了道路。我们的目标是在不同的应用场景中证实这种合作的多种优势,包括但不限于自然语言处理和图像分析,”邱说。
其他贡献者包括来自中国长沙的 Zhu Zhuu Zhu 和 Bin Chen。
该研究得到国家自然科学基金委和湖南省研究生科研创新项目的资助。
推荐阅读
- ppt设置单词配读音,PPT为课件中的单词配上读音
- 固态硬盘安装后如何分区,详解固态硬盘分区方法
- 国6排放的车能加92号汽油吗,国6排放标准实施时间什么时候
- 怎么免费注册iPhone,Apple_ID
- 微信在哪里查看自动扣费项目,手机微信自动扣费怎么查看与关闭
- 2021年中级经济师网上报名(2021全国经济师考试报名入口)
- 现在纯碱价格是多少 纯碱网最新价格报价
- 怎么设置qq背景,如何设置手机qq的聊天背景为默认的背景
- 2021醉酒驾车的处罚标准是什么,醉酒驾驶怎么处罚2022年,醉酒驾车的处罚标准是什么
- 夏普空调维修服务(夏普空调维修)
- 笔记本电脑聚合物电池和锂电池哪个好,修复笔记本聚合物电池的方法与技巧
- 欧冠欧联杯分配名额,欧冠 欧联杯 欧协杯区别(中超积分榜总排名)
- 2020特岗教师报名时间(2020特岗教师报名时间表)
- 树莓派2和树莓派3的区别(树莓派2和树莓派3对比评测)
- 电脑版qq音乐有没有听歌识曲,电脑版QQ音乐如何听歌识曲
- Intel 酷睿2双核 T6570(intel 酷睿2双核 t6500)
- 自动挡的车怎么开详细教程,自动挡的车怎么开
- 经常刷机会对手机硬件有损害吗文章,经常刷机会对手机硬件有损害吗
- 东京奥运会田径破纪录有哪些选手,东京奥运会田径破纪录有哪些
- 2021安徽省农村信用社联合社招聘100人公告(安徽农村信用社招聘网站)